HLR_V1: Arduino Line Follower Bot
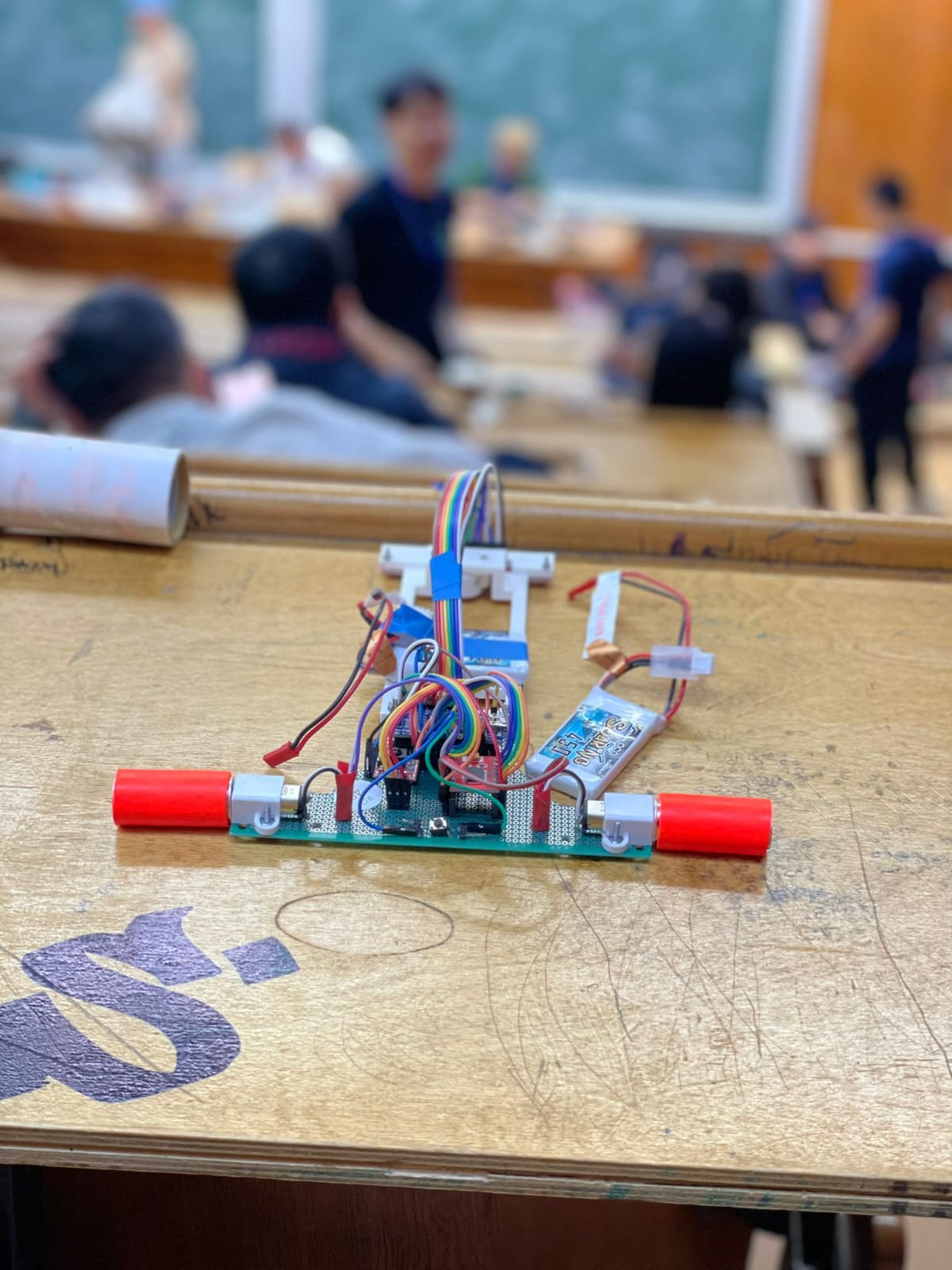
Welcome to the tutorial for HLR_V1, a fast line follower robot built on an Arduino Nano with Pololu QTR8A sensors, a TB6612FNG motor driver, and high-performance micro motors. This robot recently earned 23rd place internationally at the RoboChallenge Line Follower category.
In this guide, you'll learn how to assemble, wire, calibrate, and program your own line follower robot. We will cover the detailed hardware components (with images and technical data), wiring setup, an in-depth algorithm explanation, and tips for tuning the PID parameters.
Components & Materials
Below is a table of the main parts used in building HLR_V1. For each component, technical data, a sample image, and a short description are provided.
| Component | Image | Technical Data | Description |
|---|---|---|---|
| Arduino Nano |  |
16 MHz clock 5V Operating Voltage 32 KB Flash Memory |
The main microcontroller board providing processing power and I/O for the robot. |
| TB6612FNG Motor Driver | 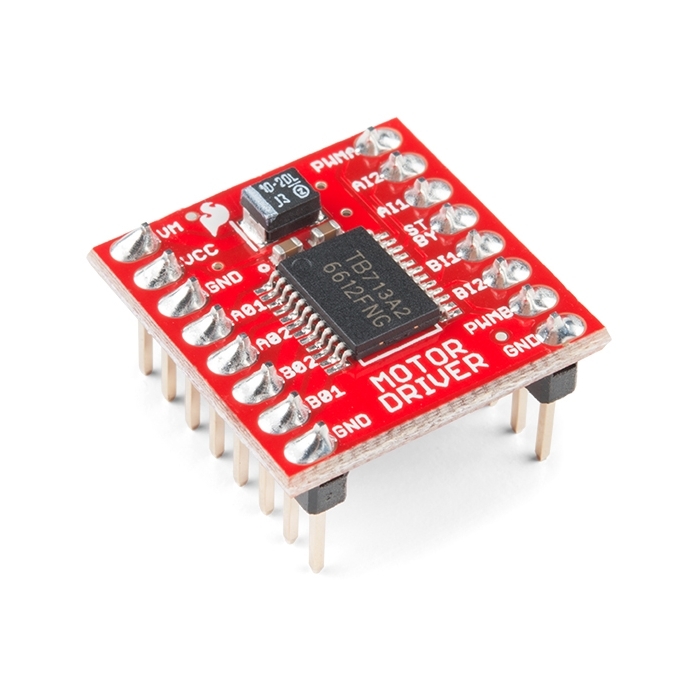 |
Operating Voltage: 4.5-13.5V Peak Current: 3.2 A |
Controls the DC motors by providing the necessary drive currents in both directions. |
| Pololu QTR8A Sensor Array | 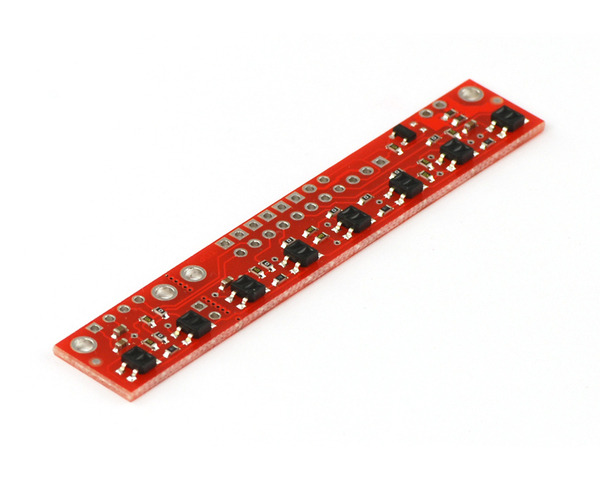 |
Analog Output (0-1023) High Resolution |
Provides accurate line detection by measuring the reflectivity of the surface beneath the robot. |
| Pololu MicroMotor 10:1 HPCB 6V | 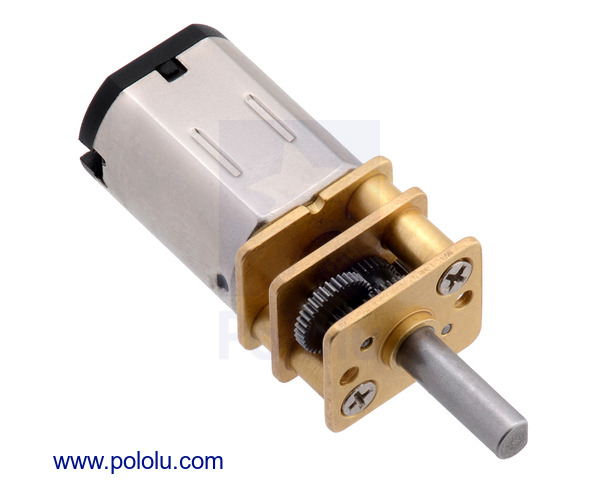 |
High Torque 10:1 Gear Ratio |
Drives the robot with high torque and precision after reduction. |
| 2S (7.4V) 450mAh LiPo Battery |  |
Capacity: 450mAh High Discharge Rate |
Supplies power to the entire system, ensuring stable voltage levels for both the Arduino and motors. |
| JSumo Start/Stop Module |  |
|
Provides an intuitive method to start and stop the robot during testing and competition. |
| JS2042 Silicon Wheels |  |
|
Ensures grip and stability while navigating challenging courses. |
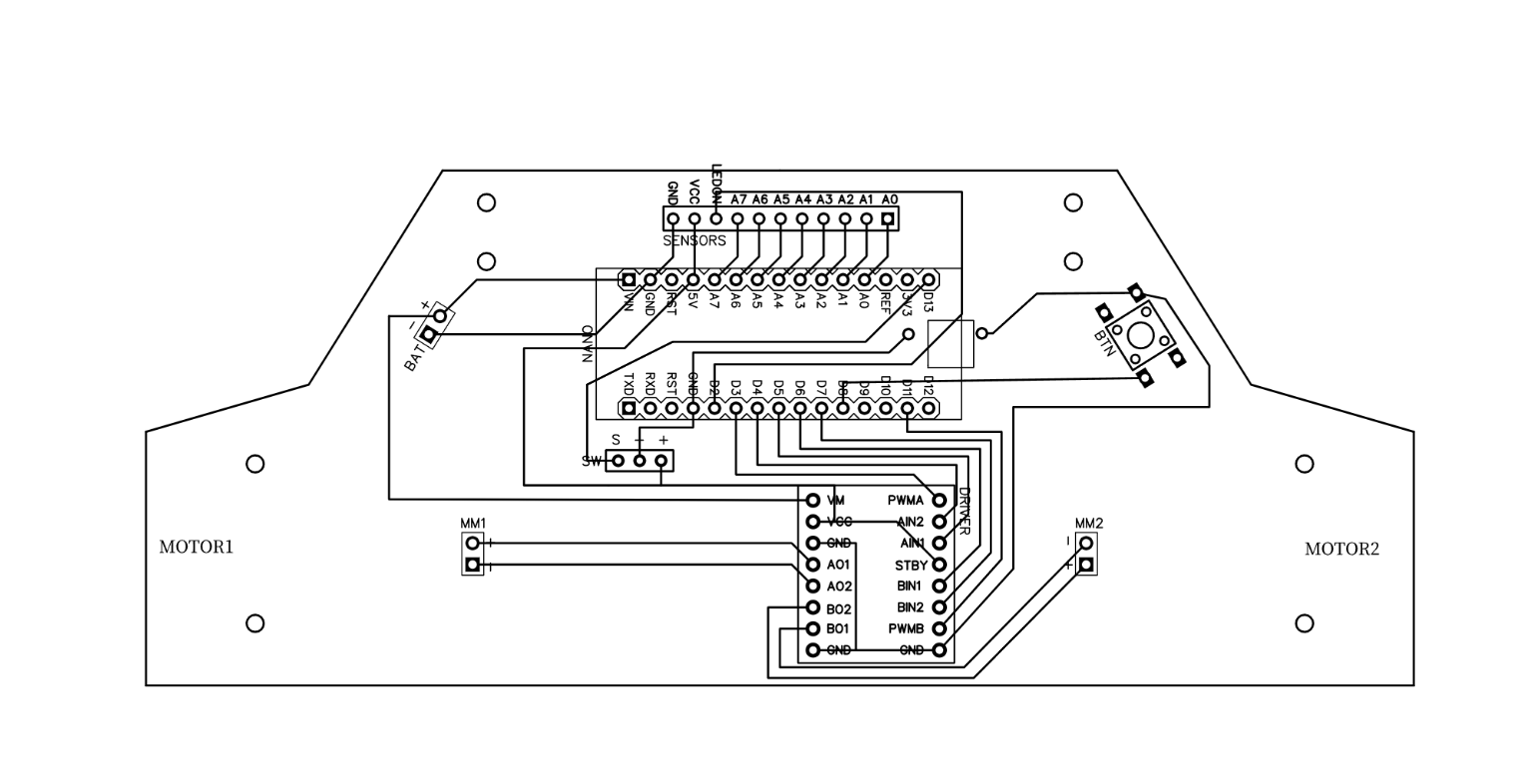
Wiring & Setup
Follow the wiring instructions carefully to connect all components correctly. The diagram below illustrates how the Arduino, sensor array, motor driver, and motors are interconnected.
-
Connect the QTR8A sensor array to analog pins
A0 through A7 on the Arduino Nano.Use a digital pin (e.g.,
D2) on Arduino to power the QTR emitters.
Wire the TB6612FNG motor driver:
AIN1 → D5, AIN2 → D4, PWMA → D3
BIN1 → D6, BIN2 → D7, PWMB → D11
Optional:
STBY may be tied high or connected to D9 for standby control.
Connect the motors to the motor driver outputs.
Power: Connect the 2S LiPo battery (7.4V) to the VIN of the motor driver, ensuring proper voltage for both Arduino and motor driver.
Double-check all connections and polarities before powering the robot. Incorrect wiring may damage components.
© 2025 - 2025 HyperLine Robotics. All Rights Reserved.